
上週好幾組未完成抓取物品,第一節課,請先完成作品。
今天的課程講述光源感應器
光源感應器的課程分為本次老師規劃兩週4節課,所以我們有較充裕的時間來實做、練習,希望同學認真學習。
◎測試光源感應器
黑白的光源感應器的兩個小燈,一個是負責打出紅光,另一個則是接收偵測反射回來的亮度,打開或關閉紅光的小燈,可以偵測到 不同數值。









◎實做練習:請找尋身邊的物品來進行測量,並嘗試回答問題
1.在明亮處,開燈或關燈所測到的兩度有差嗎?
2.距離是否會影響到所得亮度?
3.光源感應器可以感應彩色嗎?
4.請測試下面所測到的數據是否相同?


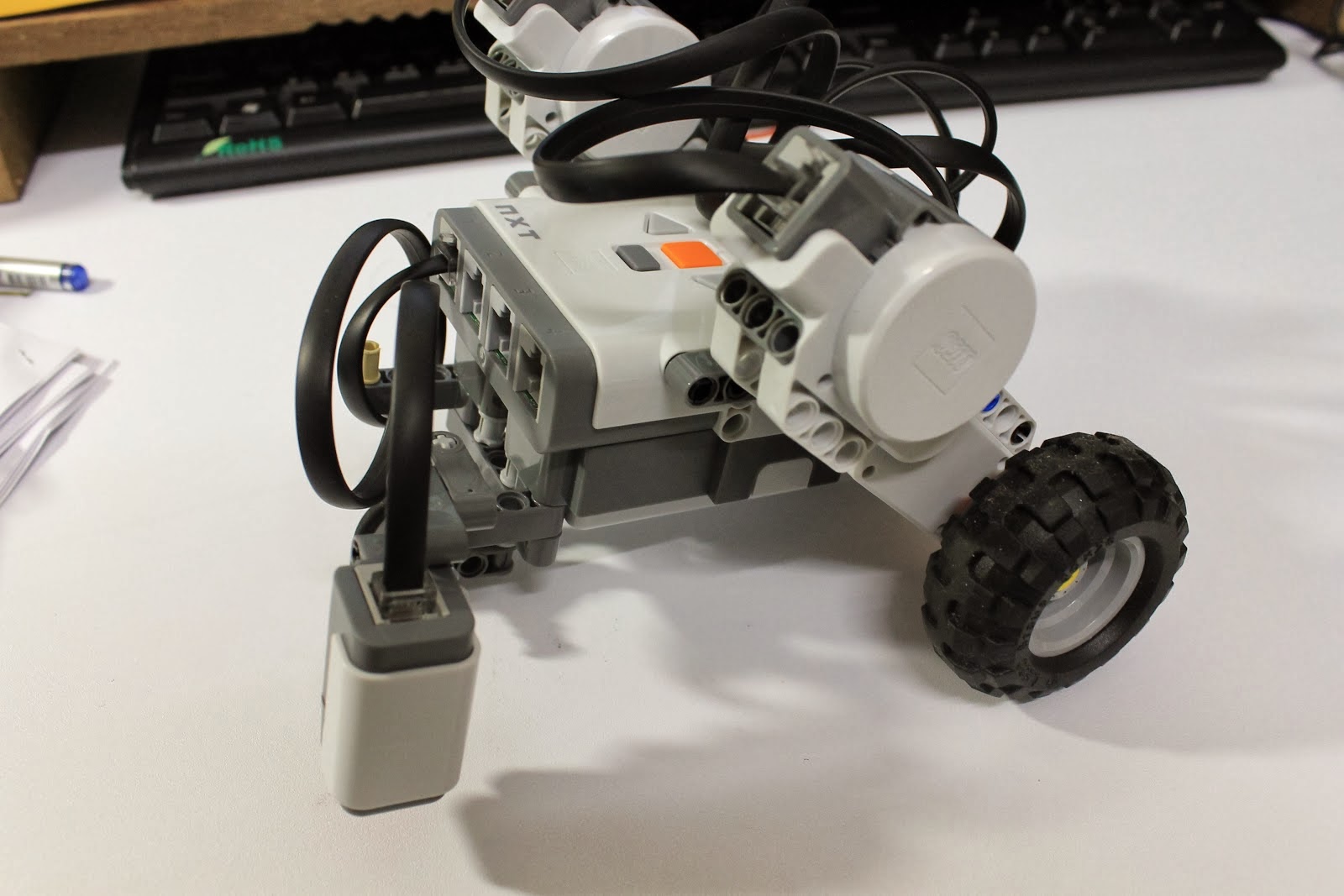
◎實做練習:組裝汽車與光源感應器安裝
請把握時間,將汽車安裝起來,並嘗試將光源感應器安裝至汽車當中。








◎觀念講述:
老師的組法並非標準答案,樂高積木可以發揮你的創意去設計,如同上次課程講述的部分,要能輕鬆發揮創意去設計,基本功夫很重要,在組裝前可以花幾分鐘先仔細看一下工具箱,先思考工具箱裡面有什麼積木,可以組出什麼樣的作品,每一個小東西都能發揮巧思,組出來的汽車才可以發揮最大創意及效果。
前面已經研究出光源感應器的特性,所以請根據前面歸納出來的答案,在安裝時應用於其
中。
◎程式部分:
在開始講述程式之前,還是要進行觀念講述,如何要讓機器人前進,必須製造出前進的移動方式,例如轉動齒輪。

但是如果遇到要轉彎的路況,就必須在程式這邊設定左轉、右轉。

但是如果我的路線是很複雜的,就必須要有一個感應器一直告訴NXT汽車,現在要怎麼走?

可是實際上要怎麼讓NXT汽車依照畫好的路線走呢?
我們必須要把線放大來看。



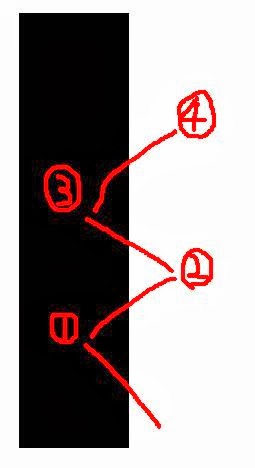
在這個情況下,便可以忽略線路多扭曲的問題。








{kind=link}
沒有留言:
張貼留言